Скетч
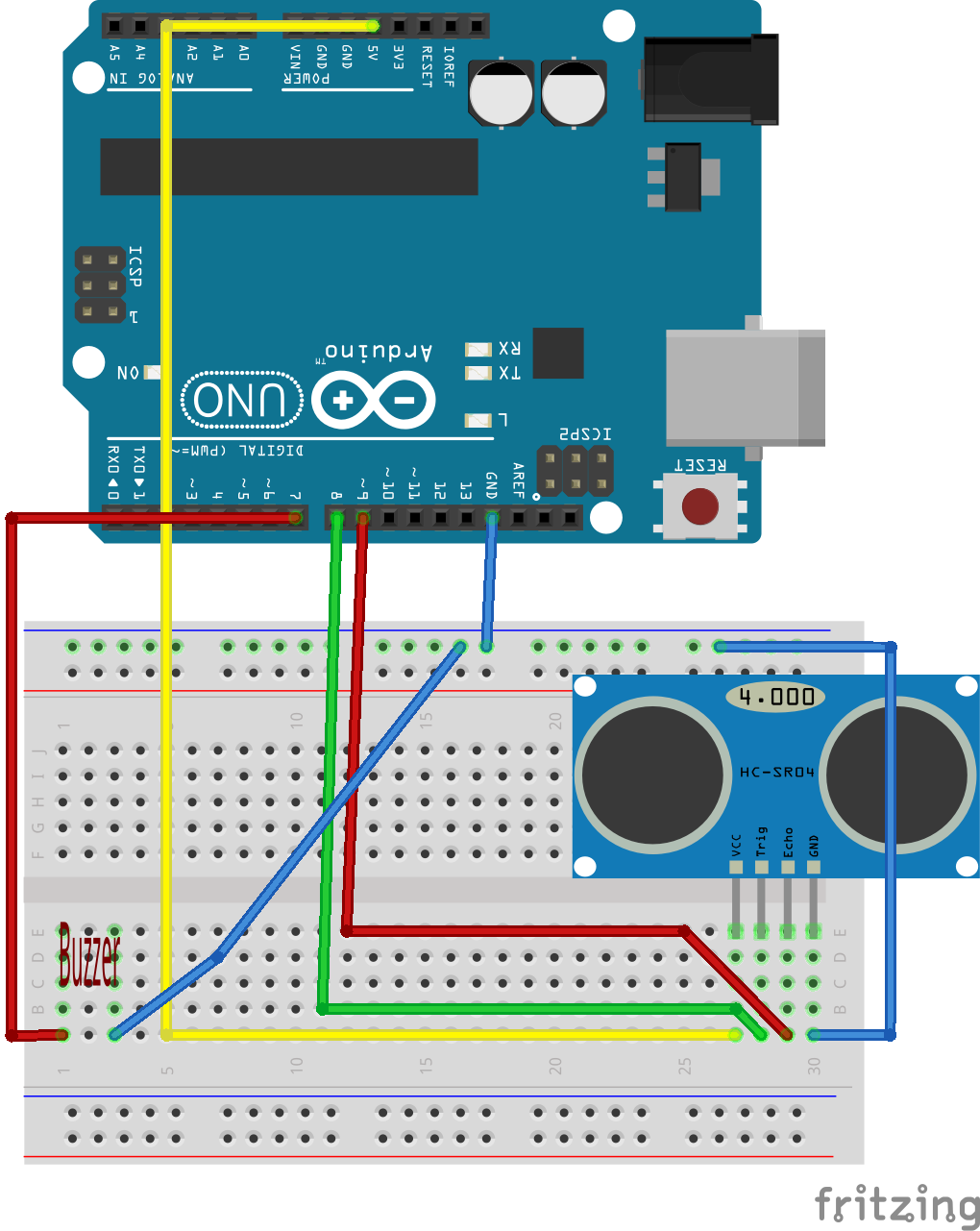
int buzzer = 7 ;// setting controls the digital IO foot buzzer
int echoPin = 9;
int trigPin = 8;
void setup ()
{
pinMode (buzzer, OUTPUT) ;// set the digital IO pin mode, OUTPUT out of Wen
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop ()
{
int duration, cm;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = duration / 58;
Serial.print(cm);
Serial.println(" cm");
delay(100);
if (cm < 0) cm = 0;
int wait = map(cm, 0, 300, 1, 100);
digitalWrite (buzzer, HIGH) ;// send voice
delay (wait) ;// Delay 1ms
digitalWrite (buzzer, LOW) ;// do not send voice
}